KinectFusion是微软研究院开发的一项实时三维重建技术,它利用Kinect深度摄像头捕捉环境数据,并通过高效的算法实现动态的三维场景建模。数据处理是KinectFusion的核心环节,直接决定了重建的精度和实时性。本文将简要介绍KinectFusion数据处理的基本流程和关键技术。
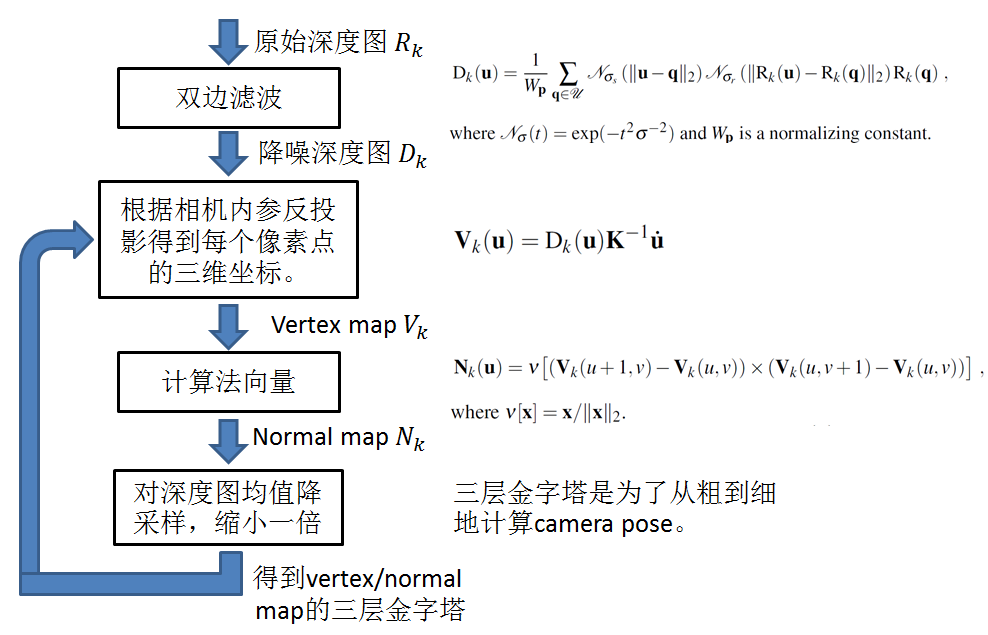
KinectFusion的数据处理从深度数据采集开始。Kinect设备每秒生成多帧深度图像,每个像素点包含场景中对应点的距离信息。这些原始数据通常存在噪声和缺失值,因此需要进行预处理,包括滤波(如双边滤波)以平滑数据,并填充无效像素,以提高后续处理的稳定性。
接下来是数据配准与融合步骤。KinectFusion使用迭代最近点(ICP)算法将当前帧的深度数据与已有的三维模型进行对齐,估计摄像头的位姿变化。一旦位姿确定,新采集的深度数据会被转换为三维点云,并融合到全局的体素网格中。这个过程涉及体素化表示,其中每个体素存储截断符号距离函数(TSDF)值,用于表示表面距离和权重。通过加权平均,系统能够逐步优化模型,适应动态场景变化。
然后,数据处理包括表面重建和渲染。KinectFusion利用移动立方体(Marching Cubes)算法从TSDF体素网格中提取等值面,生成三角网格模型。这允许实时可视化重建的三维场景。同时,系统会管理内存,仅更新可见区域的体素,以保持计算效率。
在数据处理中,KinectFusion还面临挑战,如处理大尺度场景时的内存限制和实时性要求。为此,研究人员开发了优化技术,例如分层体素表示和GPU加速,以提升性能。KinectFusion的数据处理流程体现了从原始深度数据到精细三维模型的完整转换,为虚拟现实、机器人导航等应用奠定了坚实基础。通过持续改进,这项技术正推动着实时三维感知的发展。